Partager la publication "Le microdrone sort de son cocon"
Thierry Lucas
REGARD SUR LA CRÉATION
« Car, depuis la création du monde, les perfections invisibles de Dieu,sa puissance éternelle et sa divinité, se voient comme à l’œil nu quand on Le considère dans ses ouvrages. » (Romains, 1 : 20)
Le microdrone sort de son cocon[1]
Résumé : Inspirés des insectes, de petits robots volent déjà en laboratoire, même si leur autonomie n’est pas très importante. Grâce aux travaux sur ces robots, on peut noter, en comparaison, que les solutions techniques retenues par le Constructeur divin pour créer les insectes sont systématiquement les meilleures, tant pour l’envol, la mobilité en l’air, que pour la détection des obstacles, etc. Or, il faut l’avouer : les copies humaines, même après des milliers d’heures de travail hautement qualifié, sont très loin d’atteindre l’agilité, l’efficacité et surtout la légèreté de l’original… qui de plus peut se reproduire, lui !
Cela n’a échappé à personne: il existe de nombreuses différences entre un avion et un insecte. Ce dernier, par exemple, bien que privé de GPS et d’ILS (instrument landing system), vole, évite les obstacles et se pose avec une précision exemplaire. L’insecte, il est vrai, a quelques millions d’années d’évolution derrière lui[2]. S’efforçant de rattraper le temps perdu, des chercheurs au Japon, en Europe et aux États-Unis, sont décidés à faire voler des microdrones de quelques centimètres d’envergure, comme des insectes, en leur faisant battre des ailes plusieurs dizaines de fois par seconde. Un mode de propulsion relativement silencieux, offrant une grande manœuvrabilité et permettant d’effectuer des vols stationnaires.
Pour tenter de reproduire ce vol, les chercheurs observent dans le détail les performances des mouches et des libellules. «Des fonctions qui ont été optimisées par l’évolution sont une source d’inspiration.
Mais l’observation de la nature nous conduit aussi à sortir des schémas habituels de conception», souligne Nicolas Marchand, le responsable du projet EVA (Entomoptère volant autonome).
Au sein de ce dernier, des laboratoires français développent un futur robot volant à ailes battantes de 3 à 4 cm d’envergure.
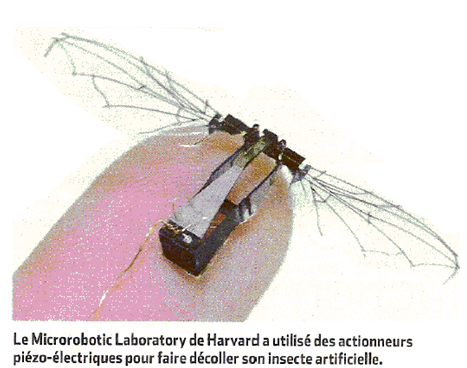
D’autres prototypes ont déjà effectué leur vol de démonstration. Comme le Delfly Micro de 10 cm d’envergure réalisé par l’université technologique de Delft (Pays-Bas) et inspiré de la libellule. À Harvard, le Microrobotics Laboratory a fait décoller une mouche artificielle de 60 mg. Le robot volant de l’université de China (Japon) s’inspire, lui, du colibri (oiseau-mouche). Tout comme le Nano Hummingbird de l’américain Aerovironment, un peu plus grand (16 cm), qui effectue d’étonnantes manœuvres, y compris le vol stationnaire. Soutenu par la Défense américaine (Darpa), ce dernier projet prépare les micro-aéronefs de demain à usage militaire.
L’obsession du poids
Réaliser des drones minuscules, qui intéressent aussi la sécurité civile, n’est que l’un des objectifs qui stimulent la recherche. « Des technologies destinées à fonctionner dans un contexte de fortes contraintes de poids, d’encombrement et de consommation d’énergie, ont de multiples applications potentielles», affirme Nicolas Marchand.
Pour concevoir leur micro-engin volant, les chercheurs ont une ligne directrice qui tourne à l’obsession: le poids! Le Delfly Micro de l’université de Delft pèse 3 g tout équipé. Son fuselage est en carbone et en bois ultraléger, sa voilure en film plastique PET. Et tout son équipement est à l’avenant. La batterie? 1 g. La caméra? 0,4 g. Le moteur? 0,45 g… Pourtant, sa conception reste traditionnelle: un petit moteur électrique, alimenté par une batterie au lithium, actionne le battement des ailes. Pas sûr que ces choix soient reconductibles pour le futur Delfly Nano qui devrait peser 1 g en tout, pour 5 cm d’envergure… «Nous évaluons tous les spectres des technologies possibles », annonce sans plus de précision Guido De Croon, l’un des responsables du projet.
Les chercheurs de Harvard, eux, ont déjà choisi. Le battement des ailes de leur mouche est provoqué par des actionneurs piézo-électriques. Une rupture technologique, pas totalement aboutie: la mouche a encore un fil à la patte, car l’énergie et la commande du vol restent déportées au sol. Les français d’EVA sont aussi partis sur l’option piézo-électrique, bien adaptée à la miniaturisation. « L’objectif est de trouver un actionneur à basse fréquence (30-40 Hz) et que l’ensemble piézo – ailes–thorax vibre à sa fréquence de résonance, pour maximiser l’efficacité énergétique », précise Ghislaine Poulin-Vittrant, chercheuse au Lema (CNRS/CEA, à Tours). Une conception novatrice: plus aucune articulation, mais un thorax en alliage flexible conçu au CEA-List, qui transmet le mouvement entre les piézos et les ailes.
Un premier prototype de l’ensemble est attendu dans les prochaines semaines.
L’une des difficultés du projet est qu’il n’existe pas aujourd’hui d’outils de simulation prenant en compte tous les phénomènes physiques (mécanique, électrique et aérodynamique) qui entrent en jeu. Les partenaires d’EVA veulent développer un modèle complet pour tout simuler en une fois. Ces outils pourraient servir ensuite à la conception d’autres systèmes électromécaniques ou microfluidiques.
La contrainte de poids pèse également sur l’alimentation en énergie du microdrone. La batterie est le composant le plus lourd du Delfy Micro (pour un vol de trois minutes …).
Mais les tenants de la solution piézo-électrique ont d’autres soucis: les actionneurs sont alimentés en 200 volts ! Il faut donc un convertisseur transformant les 3,3 V de la batterie, avec un bon rendement… et un poids minimal. « On vise moins de 500 mg, mais on n’y est pas encore », reconnaît Dejan Vasic, qui travaille au Satie, un laboratoire de l’ENS de Cachan. Un problème d’intégration en électronique de puissance, que l’on retrouve par exemple dans les satellites.
Technique de vol : les ailes battantes des insectes volants
. Le modèle naturel : Le vol battu procure une grande manœuvrabilité. Il rend possible le vol stationnaire.
. Sa déclinaison artificielle : Des actionneurs piézo-électriques créent le battement des ailes. La fréquence de battement (quelques dizaines de hertz) doit correspondre à la fréquence de résonance du système ailes-thorax-actionneurs, afin d’optimiser la consommation d’énergie.
Stabilisation : La mesure mieux que le calcul
. Le modèle naturel : Les haltères (des masses vibrantes au bout d’un poil) permettent à certains insectes de maintenir ou de rétablir leur assiette.
. Sa déclinaison artificielle : Une approche similaire, utilisant des accéléromètres, ferait l’économie de calculs complexes pour assurer la stabilité du drone. Le biomimétisme suggère aussi des solutions de rupture par rapport aux conceptions traditionnelles.
Aérodynamisme des insectes : économe en énergie
. Le modèle naturel : La structure de l’aile conditionne l’aérodynamisme de l’insecte. La flexibilité de la voilure contribue à une exploitation optimale de l’énergie.
. Sa déclinaison artificielle : L’aérodynamique à cette petite échelle est mal connue. Les logiciels de calcul utilisés par l’aéronautique ne sont pas adaptés. Des expérimentations et des simulations permettront de mieux comprendre et de reproduire l’efficacité du vol de l’insecte.
Vision simple mais efficace
. Le modèle naturel : Un petit nombre de capteurs et de neurones suffisent aux insectes pour percevoir le mouvement: éviter des obstacles, poursuivre une proie… .
. Sa déclinaison artificielle : Un capteur de quelques pixels et une électronique simple pour reproduire le «traitement du signal» et le traduire directement en commandes sur le vol. Le tout doit peser moins de 1 g. Une difficulté: le vol à ailes battantes perturbe le système de vision.
Aux limites des technologies
Reste à piloter l’engin, avec des capteurs (capteur d’images et accéléromètres) et une intelligence embarquée.
La vision du robot est très inspirée de la manière dont la mouche perçoit et utilise le flux optique (le défilement des images dans l’œil de l’insecte en mouvement), avec un minimum de moyens. À l’Institut des sciences du mouvement, à Marseille, l’équipe Biorobotique a conçu un capteur de deux à six pixels qui réalise correctement la détection d’obstacles, et pèse 1 g : encore trop lourd! Autre difficulté à surmonter: à chaque battement d’ailes, le mouvement du corps de l’insecte perturbe le système visuel… Du côté de l’électronique de traitement des données et de commande, avec l’évolution rapide de la microélectronique, tous les espoirs sont permis. Mais les contraintes demeurent: « Les puces sont très chargées: l’analyse du flux optique peut consommer jusqu’à 96% de la capacité de traitement, souligne Nicolas Marchand. Il faut optimiser le code et gérer les priorités entre les tâches. »
Les microdrones poussent les technologies jusqu’à leurs limites. Ils entraînent aussi les chercheurs dans un domaine plein d’inconnues: l’aérodynamisme des aéronefs de très petite taille, qui n’a rien à voir avec celui des avions ou hélicoptères. Or, l’aérodynamisme a une influence directe sur la consommation d’énergie, et donc sur l’autonomie du robot. Les concepteurs du Delfly étudient l’effet de l’angle des ailes et de la fréquence des battements, de l’emplacement des raidisseurs sur la voilure, du profil du bord d’attaque de l’aile… Tandis que l’Irccyn (Nantes), pour EVA, s’intéresse de près à la déformation de l’aile pendant le vol, qui participe, semble-t-il, à l’utilisation optimale de l’énergie par les animaux.
Les données expérimentales recueillies serviront aussi à construire des modèles de simulation, qui font cruellement défaut aujourd’hui. Et qui permettront peut-être la construction d’avions à l’aérodynamisme plus «subtil », de conception radicalement nouvelle.
[1] Repris de L’Usine Nouvelle, n°3251 du 1er septembre 2011, pp. 52-54
[2] Ndlr. Nous laisserons à Thierry Lucas et à L’Usine Nouvelle l’entière responsabilité de ce propos avantureux !